Mechanical Design (ENGR 3330)
Taught by Dave Barrett, our goal is to apply our skills by designing an ROV that can successfully rescue the Olin TunaSub- a 6 ft long, 150 pound autonomous robot. Our final design is shown below. A modular design made primarily from 3/8" thick PET plastic and 6061-T6 aluminum, we anticipated that it would cost about $13,000 to make.

A rendered image of our final ROV design which was selected for fabrication next semester
What we learned
The focus of the class was to learn how to design and make sure what we designed didn't fail. User-Oriented-Collaborative-Design (UOCD) taught us what to design, Design Nature introduced us to the design process and how to build to specifications, and Mech Design focused on how we should design something in the first place. Besides learning about simple machines, the seven basic structures (I, U, C, etc), joints, and fasteners, we also learned how to design our own transmissions, calculate the amount of power we would need in a given system, and produce professional mechanical report packages, complete with finite element analysis (FEA) and mechanical drawings. Throughout the semester, we learned how to apply each of the mechanisms to designing our first iteration of a remotely operated vehicle (ROV) and eventually, come up with a simple, elegant ROV that could be manufactured and used for rescuing the tuna from the bottom of Boston Harbor.
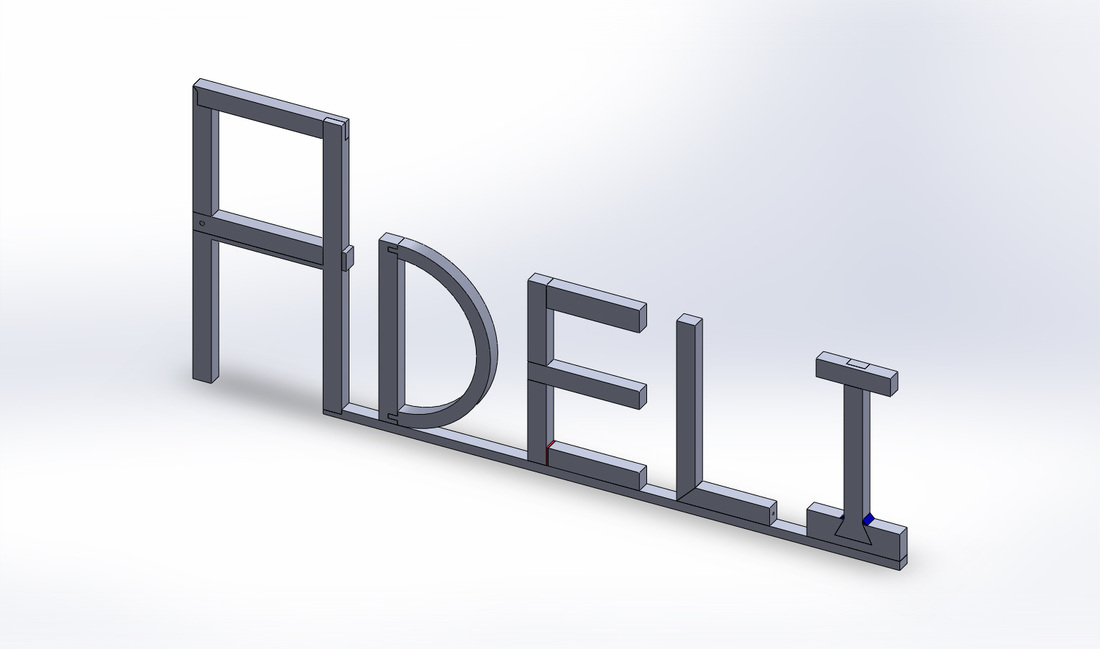
Writing my nickname with 7 basic structures, various joints, and 3 different types of fasteners
|
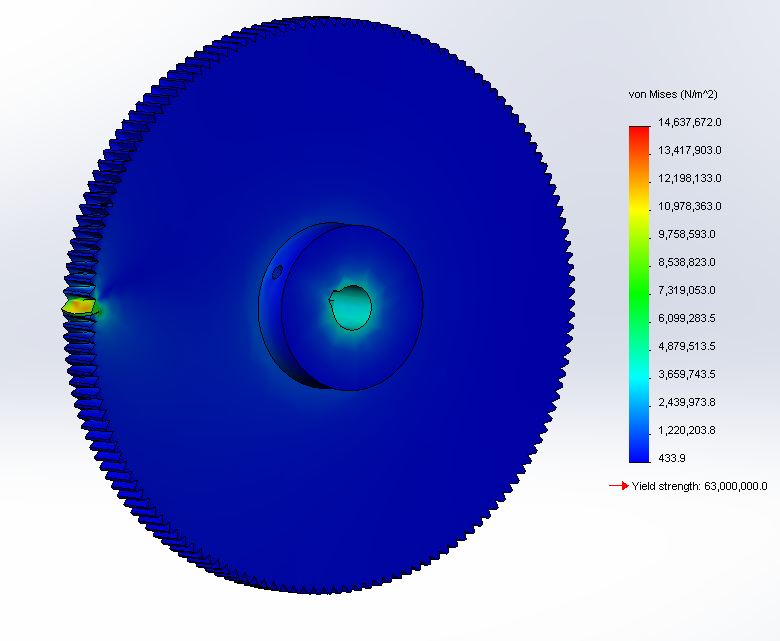
FEA analysis on the tooth of an output gear on our first iteration of the ROV design
|
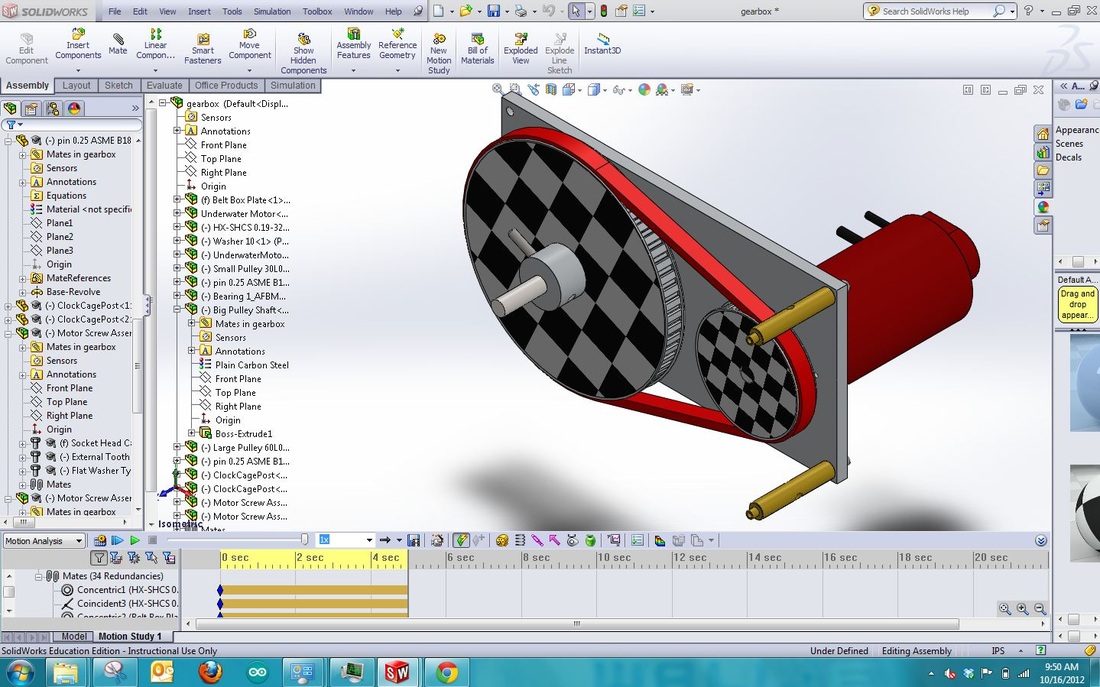
In-class assignment on designing a belt-driven transmission in Solidworks
|
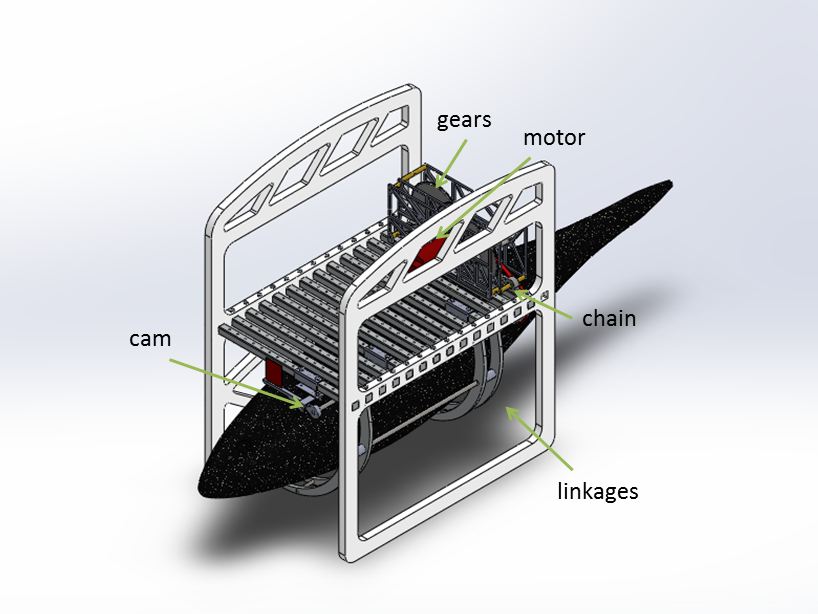
First complete iteration of capture mechanism transmission. Included all basic transmission components.
(if it looks like it's somewhat overpowered we agree)
|
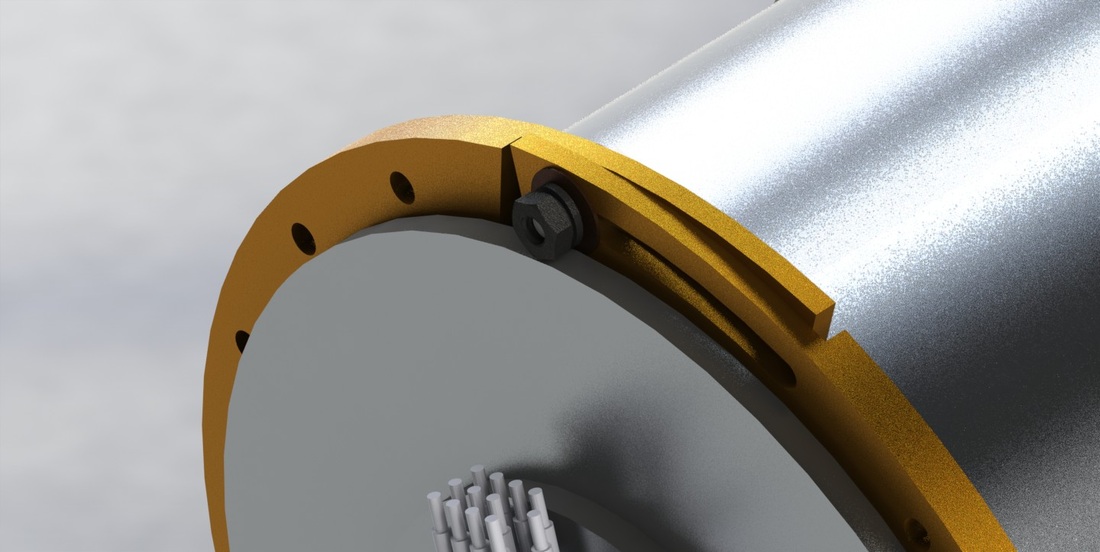
Rendered image of adjustable clamp I designed to hold the pressure vessel. Note the mounting points for additional hardware.
|
