ENGR 3399: Robotics 3
Making a Tetris-Playing Robotic Arm
|
The Olin robotics program is still under development, and this is the first academic year they've been able to offer Robotics 3, which focuses on higher-level software development using ROS + Python. The project I'm involved with was inspired by robot arms that could sort out recycled waste. A robot that could discern objects on a moving conveyor belt and be able to pick them out was a challenging and real application-based problem. Especially if that robot could play a game we're all familiar with, like Tetris!
|
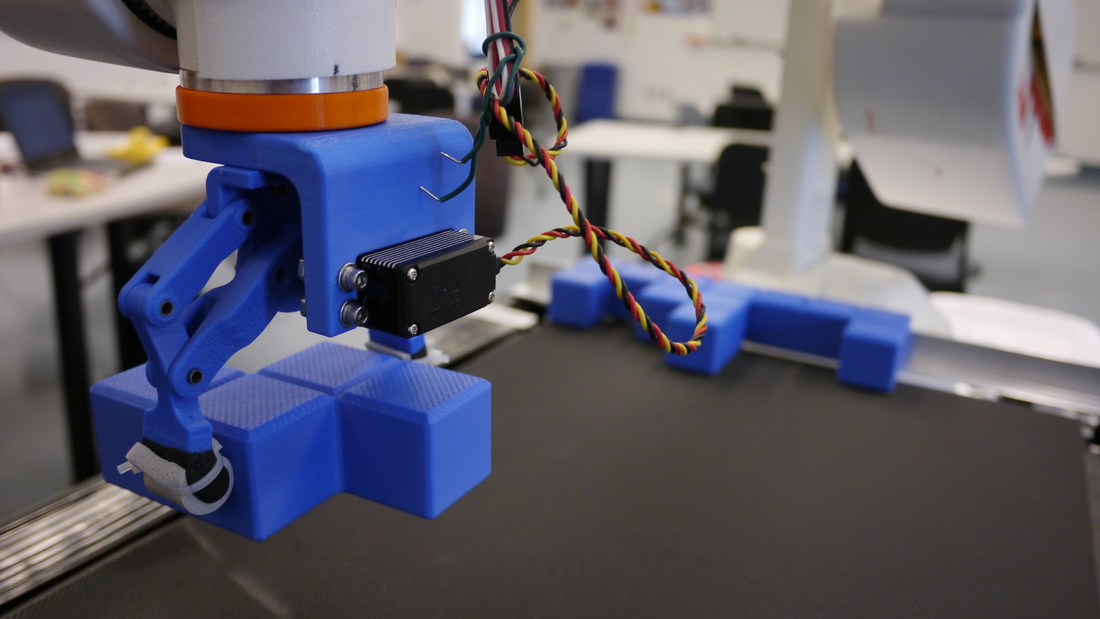
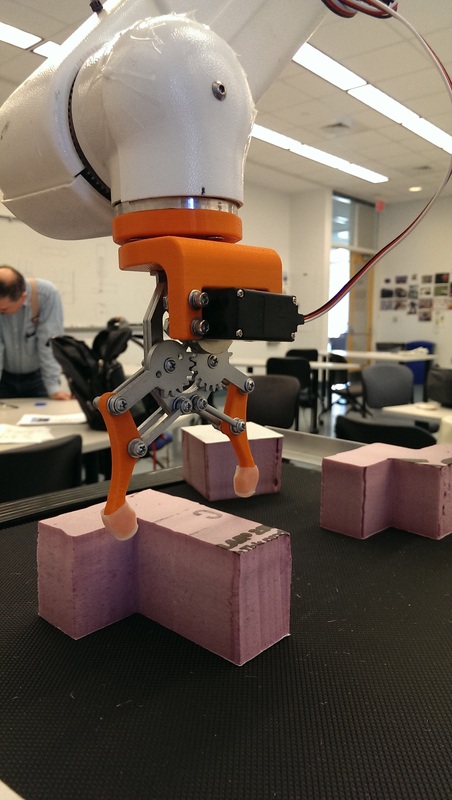
Latest revision of the system. Our gripper was entirely 3D printed and designed to reduce play (which was a problem with the initial gripper we bought). The gripper is attached via 2 magnets (which has saved it many times when the arm has crashed into the table).
|
Responsibilities
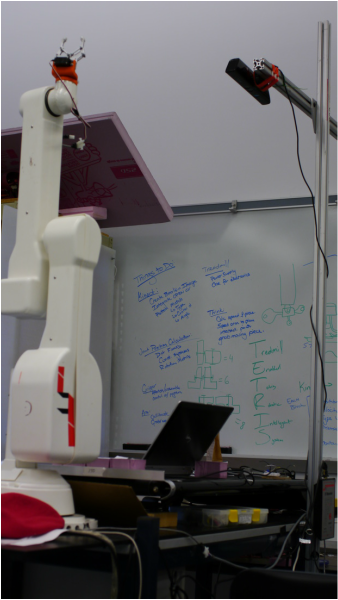
Our current setup.
|
The project is currently underway! Main tasks include fabrication and design of electronics enclosure, assisting with the debugging of OpenNI Kinect code running on Ubuntu 12.04 with ROS Hydro, and software algorithm design.
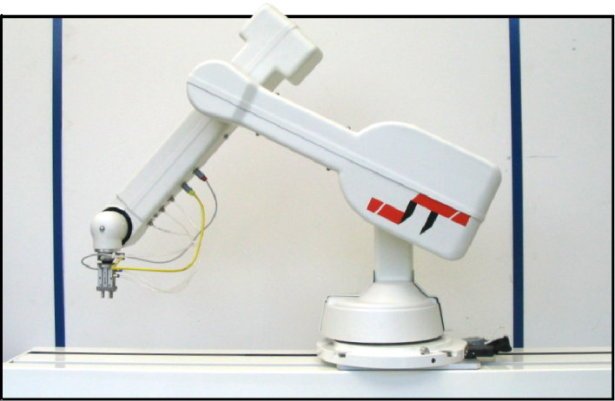
A picture of the same model robot arm we are using, which is an ST Robotics R17.
Check out our repo: https://github.com/trevhoot/tetris_arm
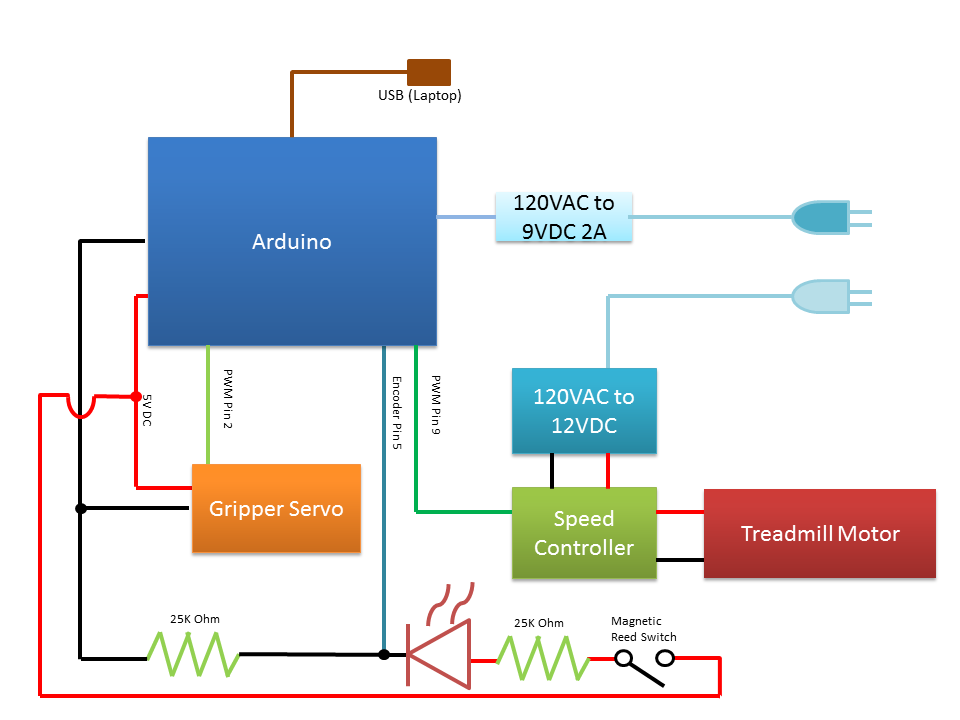
Our hardware layout:
|
Our 1st iteration of the gripper design, which utilizes 4 magnets to hold the hand in place (so that if we do happen to slam it too hard on the treadmill it will pop off instead of deforming one of our linkages). (Gripper was purchased from you-do-it electronics.)
|
Early test of our system picking up pieces |
