class Overview
Not only did this class give a great foundation as to how to do the math to solve robot motion, but it also gave a chance to build and explore joint movement with a series of sensors to detect finger motion for hand rehabilitation.
Robot dynamics as applied to making hand rehabilitation devices

Building our modelWe created a CAD model which was then implemented in SimMechanics, which allowed us to run a GUI in MATLAB that showed the current joint angles.
|

Model verificationWe then verified our model against a motion capture system. The IMU data was fairly reliable, which all things considered, was quite good for a hobby-level product from Adafruit.
|
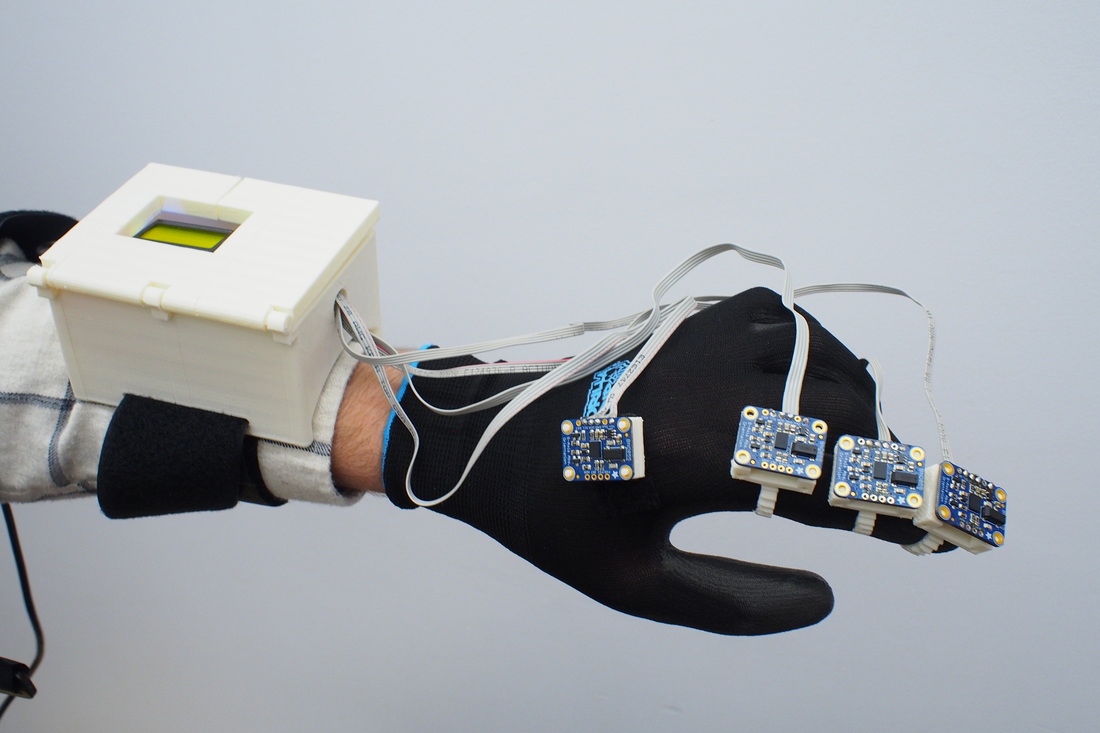
glove implementationThe purpose of this iteration was to see if we could get reliable joint data from a hand as opposed to a finger model. Although sensor alignment was a problem, it was overall fairly successful and could lead to having a fully instrumented hand in the future.
|
|
|

To a great team and a great project!
|
|
|
|
|
