Research at Olin College (Summer 2014)
This summer I was the project manager for the OysterBot project and helped out with the various other projects going on in the lab, such as our robotic tuna submarine and SnotBot.
UPDATE 11/17/2015: I Can Now Talk About Oysterbot. I present to you-- Locus Robotics

Early prototype testing
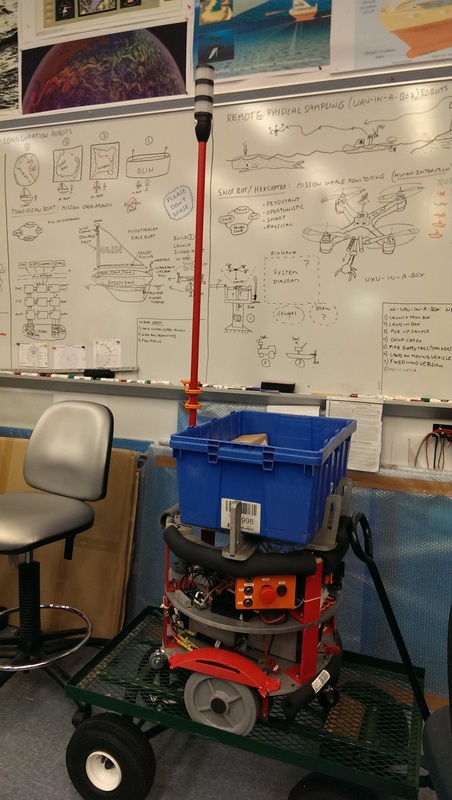
Side view as we got ready to transport the vehicle to our sponsor's location.
|

The actual product, about 2 years after my team's first prototype. (Image courtesy of the Locus Robotics website, locusrobotics.com)
Check out Locus Robotics (they've got a great video of the product on their website).
One of our earliest tests at Olin with our given sensor payload (at the time, we used a series of Sharp infrared sensors to be cost effective).
|
Olin Tuna-inspired robotic submarineThis project was all about going back to the basics-- could you use a waterproof servo and some cables to move a short segment of the tail to then propagate that motion through the rest of the tail?
(With a real fish, if you hold it from its head and wiggle it from side to side, you'll see that the entire body follows through with the motion, so it seemed pretty plausible.) We hooked up a few cables and had it swim around the pool-- it worked! (Then it was Justin's turn to bash on how to optimize the tail motion and look at cool vibration designs....) |
|
