PremiseOur goal was to develop a back-mounted camera stabilization platform for use on rugged terrain, specifically for park rangers who might be interested in documenting trail condition, though it could also be used for independent film crews.
Controller desiredNeeded a controller to compensate for the high-frequency disturbances induced from waking and the low-frequency motion from walking up and down.
|
Approach
Conclusion
Future Work
|
|
|
|
|
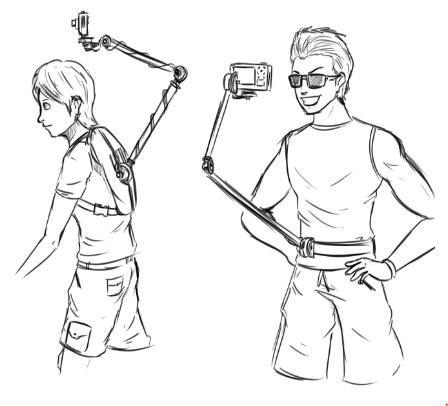
Proposed design/mounting strategy for such a system
|
Our project was somewhat inspired by this video.
|
