Voith-Schneider Propellers

The Voith-Schneider propeller is made by Graupner and is based on the actual propellers made by Voith that you can find on boats all around the world. Each blade can rotate itself around a vertical axis. The internal linkages (gears on the actual propeller) change the angle of attack of the blades in sync with the rotation of the plate, such that each blade can provide thrust in any direction, similar to the collective and cyclic thrust of helicopters. (Taken from http://en.wikipedia.org/wiki/Voith_Schneider_Propeller)
Phase one of this project involved mounting two VSPs on a boogie board and developing the control interface between a laptop and an Arduino. Although we weren't able to reach autonomy, we were still able to control the vehicle with a R/C controller by the end of spring 2012. WE submitted an abstract to the 2012 OCEANS MTS/IEEE conference and it was accepted into the Technical Program. However due to logistical difficulties (the system and it's makers were separated by 3000 miles), we will not be participating.
The goal for phase two is to make it an autonomous vehicle and understand the physical characteristics of the way the vehicle handles in the water. If this is successful, we will work towards building an "underwater hamster ball" with two propellers offset at a 30 degree angle. This is still a conceptual idea but would allow us to have full 360 degree rotation under the water.
Phase one of this project involved mounting two VSPs on a boogie board and developing the control interface between a laptop and an Arduino. Although we weren't able to reach autonomy, we were still able to control the vehicle with a R/C controller by the end of spring 2012. WE submitted an abstract to the 2012 OCEANS MTS/IEEE conference and it was accepted into the Technical Program. However due to logistical difficulties (the system and it's makers were separated by 3000 miles), we will not be participating.
The goal for phase two is to make it an autonomous vehicle and understand the physical characteristics of the way the vehicle handles in the water. If this is successful, we will work towards building an "underwater hamster ball" with two propellers offset at a 30 degree angle. This is still a conceptual idea but would allow us to have full 360 degree rotation under the water.
Prototype 1 on a Boogie Board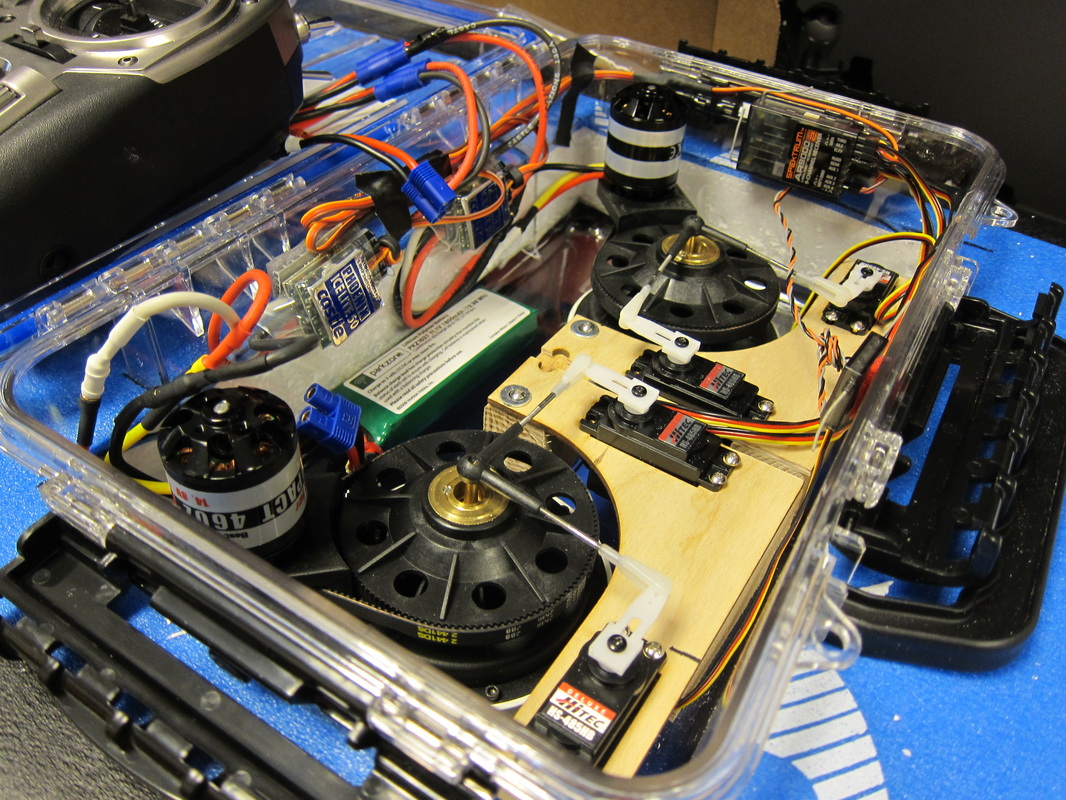
With the help of some methacrylate and a waterproof polycarbonate box, we were able to mount the propellers and servos in our attempt to properly map the servo throws to our RC flight controller.
|
Driving the VSP Vehicle SP 2012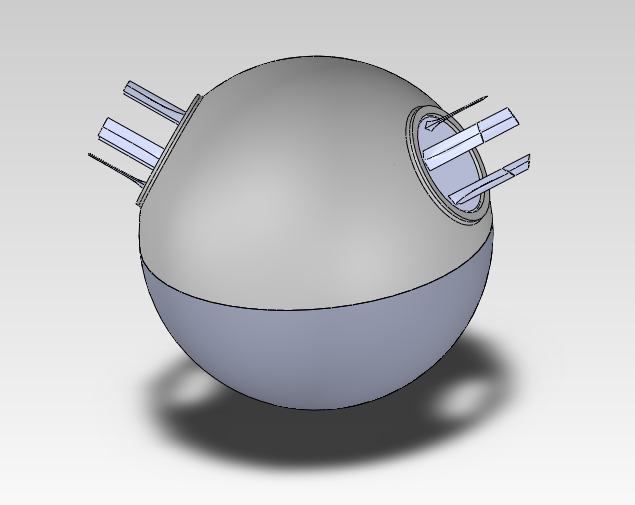
|



